Robot.get_value(device, param) for Lowcar Devices
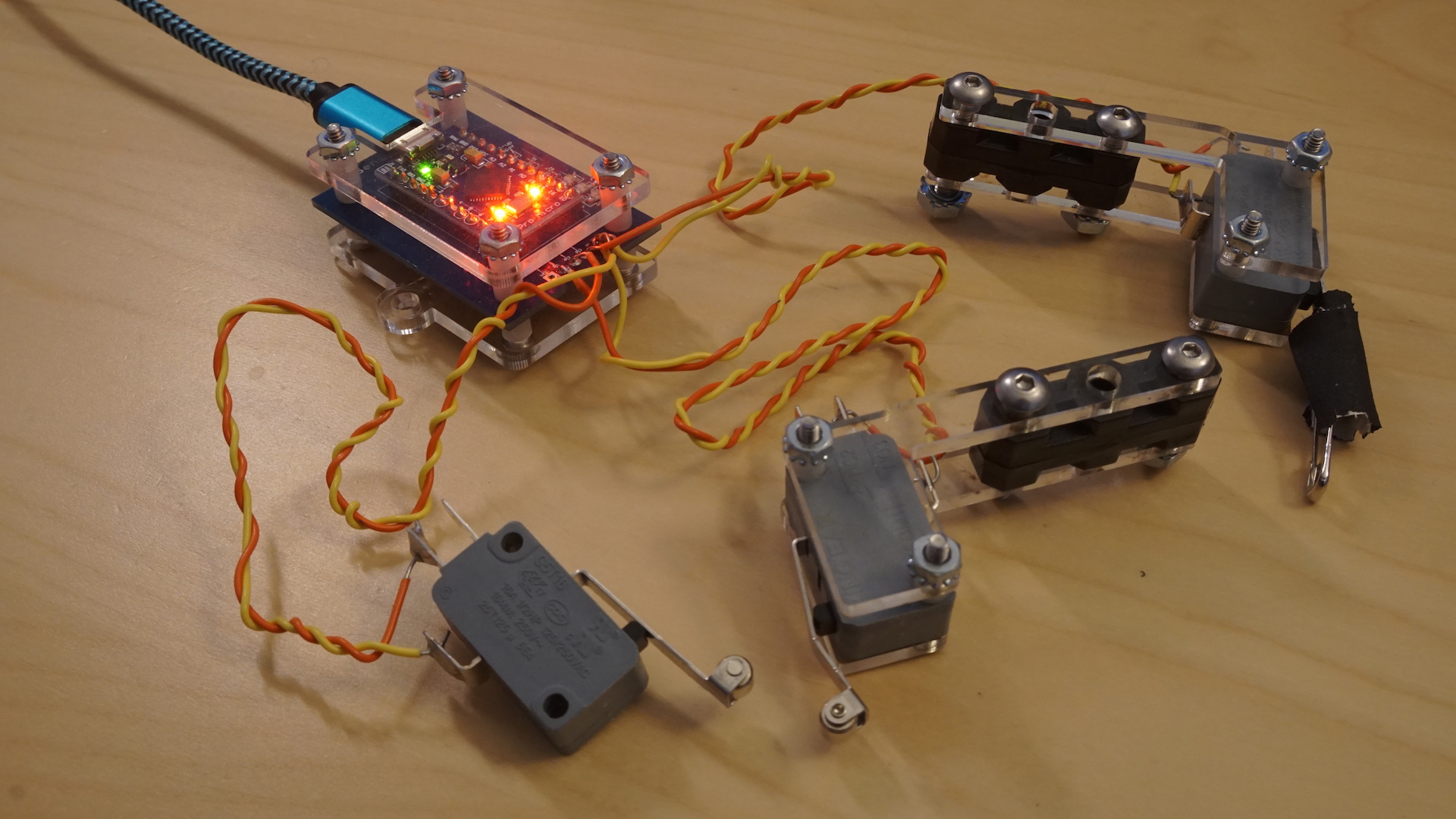
Limit Switch
Returns a value from a specified device_id and param
param for a Limit Switch
"switch0""switch1""switch2"
The parameters for a Limit Switch describe which of the three switches is being read. The boolean value will be True if the specified switch is being pressed and False if it is not.
Sample Usage:
# returns a boolean for whether or not switch0 is pressed
Robot.get_value(limit_switch_id, "switch0")
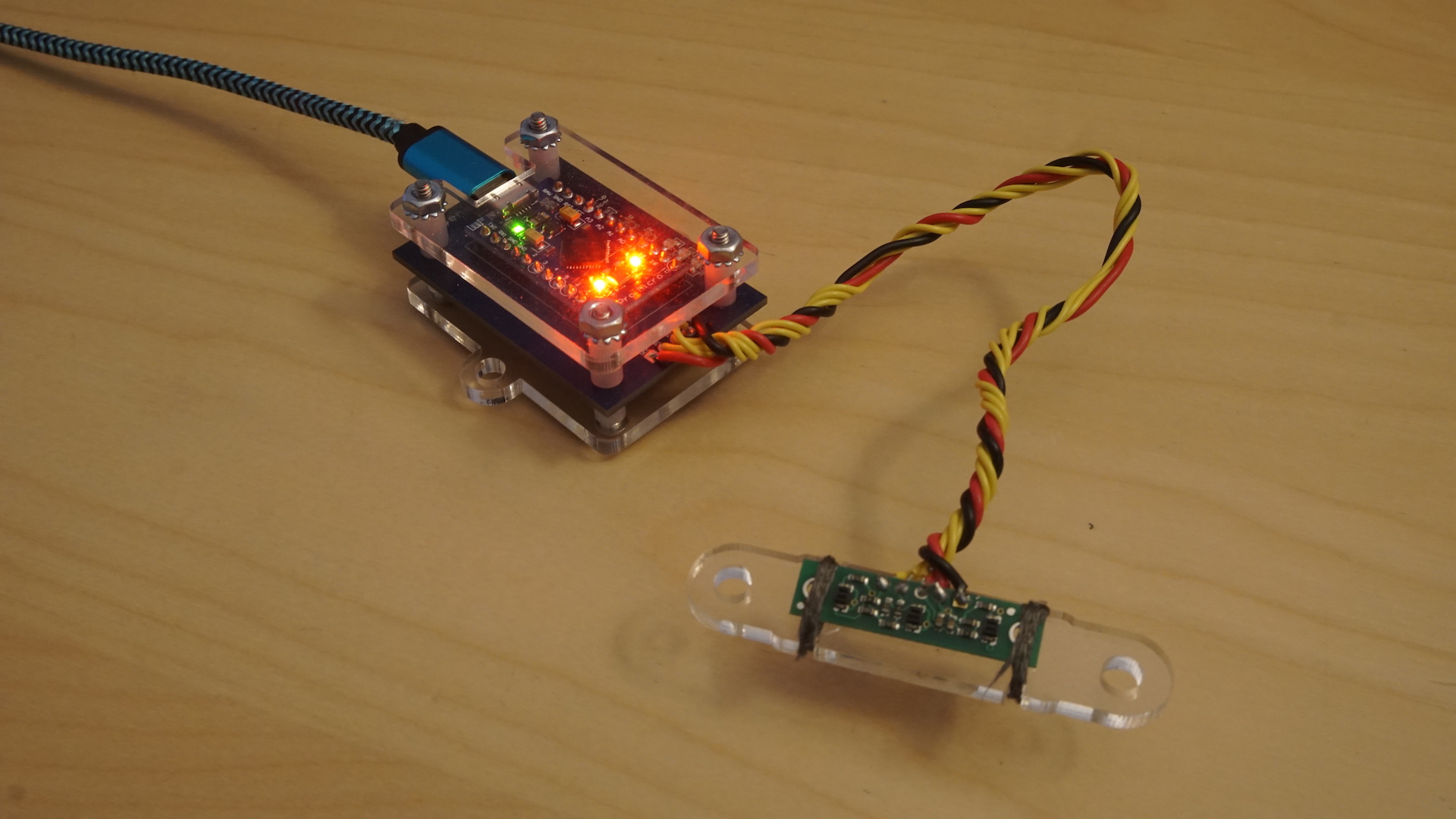
Line Follower
 Returns a value associated with the
Returns a value associated with the device_id and param specified.
The device being specified is a Line Follower.
parameters for a Line Follower:
"left""center""right"
The param for a Line Follower describe how much light is being reflected into each sensor. It returns a value between 0 and 1 where a lower value means less light and the sensor is farther off of the reflective tape.
Sample Usage:
# returns how much light is seen from the center sensor on the line follower
Robot.get_value(line_follower_id, "center")
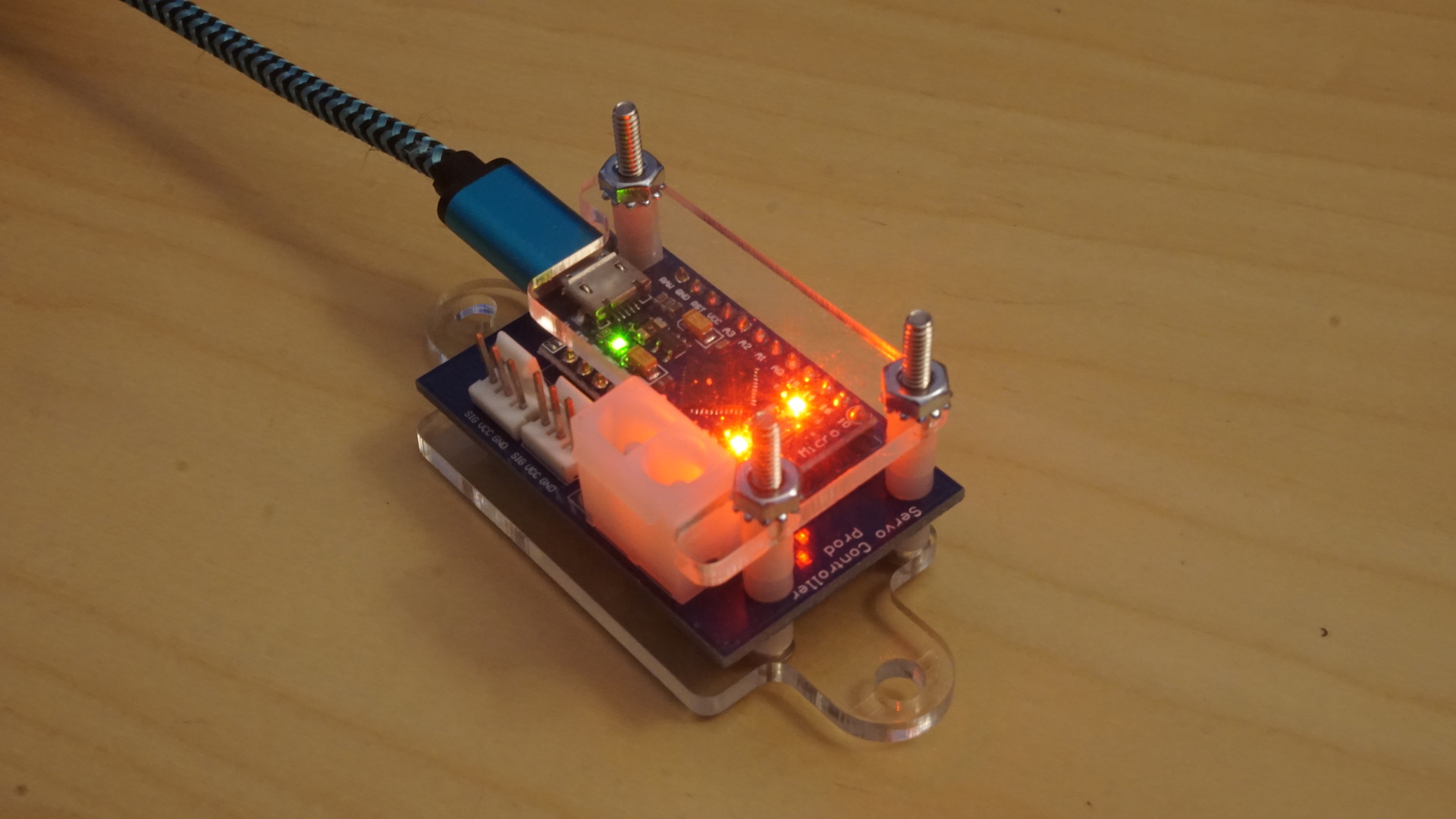
Servo Controller
 Returns a value associated with the
Returns a value associated with the device and param specified.
The device being specified is a Servo.
param for a Servo:
"servo0""servo1"
The parameters for a Servo describes what angle the servo has turned to. It returns a Float from -1 to 1 where both -1 and 1 represent the two end positions for the servo.
Sample Usage:
# returns the current angle of servo0
Robot.get_value(servo_id, "servo0")
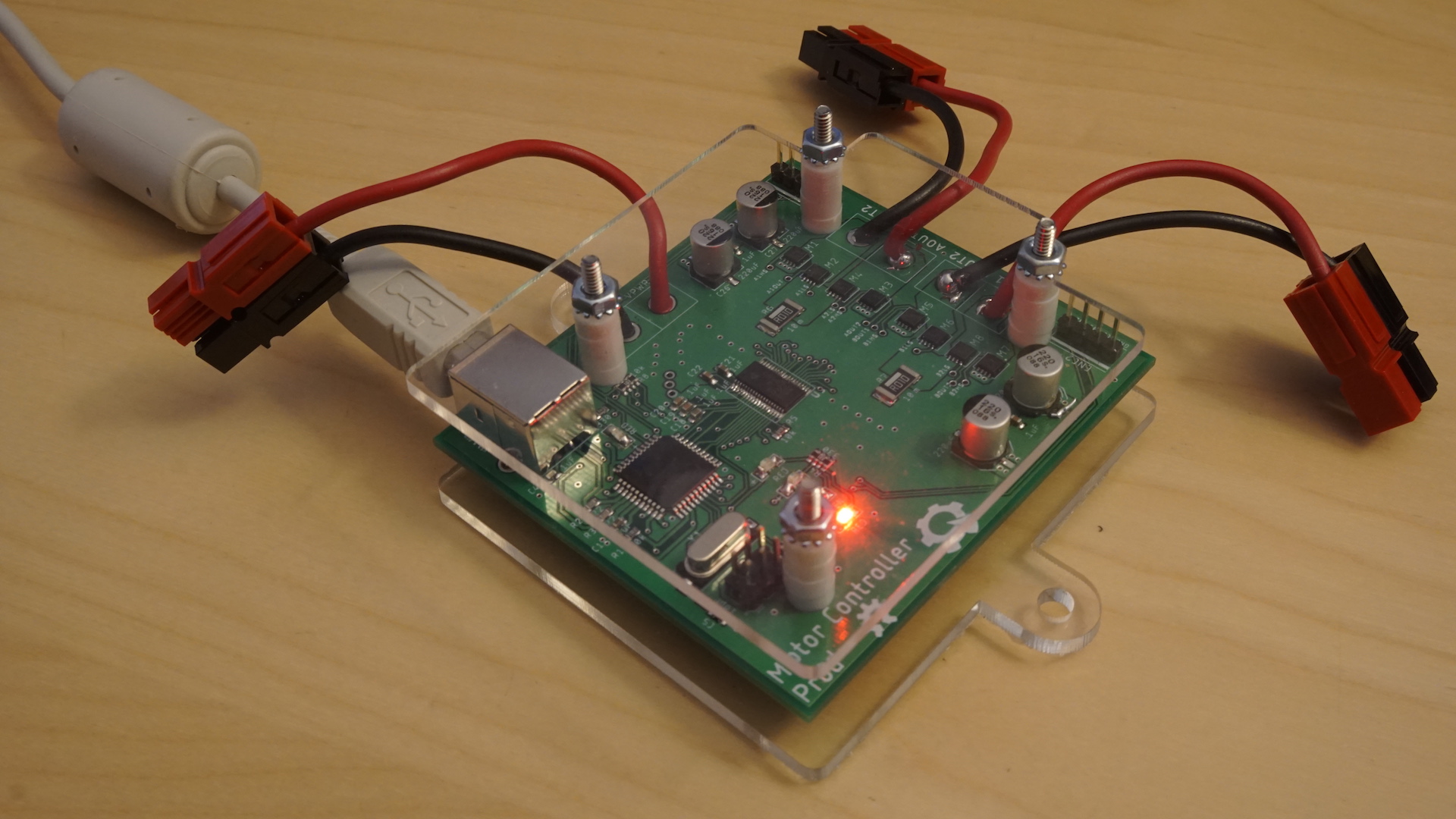
KoalaBear
 Returns a value associated with the
Returns a value associated with the device and param specified.
The device being specified is a YogiBear.
parameters for a YogiBear:
Motor A
"velocity_a""deadband_a""invert_a""pid_enabled_a""pid_kp_a""pid_ki_a""pid_kd_a""enc_a"
Motor B
"velocity_b""deadband_b""invert_b""pid_enabled_b""pid_kp_b""pid_ki_b""pid_kd_b""enc_b"
The parameters for a KoalaBear can be split into 3 categories:
Motor Control includes:
"velocity"which returns a float from -1 to 1 which describes the direction the motor is turning and it's power."deadband"which returns the threshold that velocity must pass before a change is made to"velocity"
Encoder Control includes:
"enc"parameters which return information about the position and velocity of the robot. Position is returned as an integer that represents the number of ticks of the encoder. There are 46 per revolution of the encoder.
PiD Control includes:
"pid_kp","pid_ki", and"pid_kd"parameters which return the proportional, integral, and derivative coefficients on the motor controller."pid_enabled"parameter returns whether or not pid is enabled for a motor.
Sample Usage:
# returns the current speed of Motor A as a value from -1 to 1
Robot.get_value(motor_id, "velocity_a")